“长期定点剖面观测型AUV系统”(以下简称“定点观测AUV”)是中国科学院先导专项项目四的一个子课题,是自主式连续观测系统的一个重要组成部分,为获取敏感黑潮海域的水文观测数据提供装备支撑。项目由中国科学院沈阳自动化研究所负责总体,联合中国科学院海洋研究所共同研制。
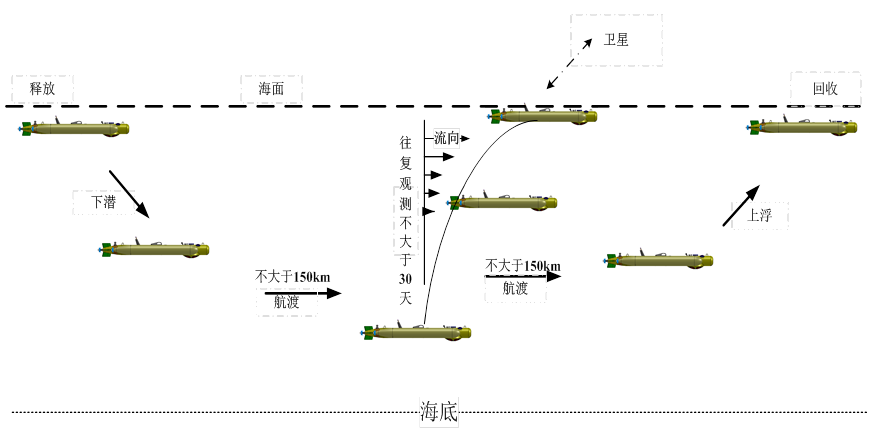
与传统潜标的定点系泊观测不同,长期观测型AUV系统实现的是定点自升沉观测,即按照预定周期,每间隔若干小时升沉一次,实现对海域深度内海洋环境垂直剖面的观测。为节省能源,实现长期观测,以及满足上浮观测过程中漂移距离的指标要求(3海里),应根据黑潮区域的海流分布,实时规划运动轨迹并采取合适的观测策略,使长期观测型AUV系统具有适宜的升沉速度和稳定性,以及在潜浮过程中控制位置偏移在要求范围内。
2015年6月初设备进入湖试现场湖,截止至目前共进行37个潜次试验成功潜次32个。单项性能试验基本完成包括:无线电及无线网桥作用距离试验,水平面航行控制试验,垂直面航行控制试验,自主导航标定试验,自主潜浮控制试验,定点观测性能试验等。
该系统的实验成功将填补我国在黑潮流经敏感海域的海洋环境信息空白,为我国近海海洋科学研究提供数据支撑;提供具有国际先进水平的长期定点连续观测AUV平台,提升我国自主海洋观测技术水平。